Paper:
Analysis of Muscle Activity in the Sit-to-Stand Motion When Knee Movability is Disturbed
Kazunori Yoshida*, Qi An*, Hiroyuki Hamada*, Hiroshi Yamakawa*, Yusuke Tamura**, Atsushi Yamashita*, and Hajime Asama*
*The University of Tokyo
7-3-1 Hongo, Bunkyo-ku, Tokyo 113-8656, Japan
**Tohoku University
6-6-01 Aramaki Aza Aoba, Aoba-ku, Sendai 980-8579, Japan

Sit-to-stand motion is an important daily activity, and disability of motion can significantly reduce quality of life. Therefore, it is important to understand the mechanism of sit-to-stand motion in order to prevent such scenarios. The sit-to-stand motion was found to be generated by four muscle groups, through muscle synergy. However, it is unclear how muscle synergy can be controlled. Human sit-to-stand motion may be planned based on body condition before motion. In this study, we aimed to clarify the relationship between body condition and muscle activity during the sit-to-stand motion. Accordingly, we measured the muscle activity when knee movability was disturbed as a condition of body change. We also measured the muscle activity during normal sit-to-stand motion and sit-to-stand motion with disturbed knee movability using surface electromyography. Subsequently, we extracted the muscle synergy from the measured muscle activity and compared the activity levels of muscle synergy. The results revealed that muscle activity contributing to forward bending increased and that contributing to the rise of the hip and stabilization decreased when knee movability was disturbed. These results suggest that humans compensate for disturbed knee movability with forward momentum and bending motion. Moreover, this implies that humans adjust their motion to various environments or body conditions by adjusting the level of forward bending activity.
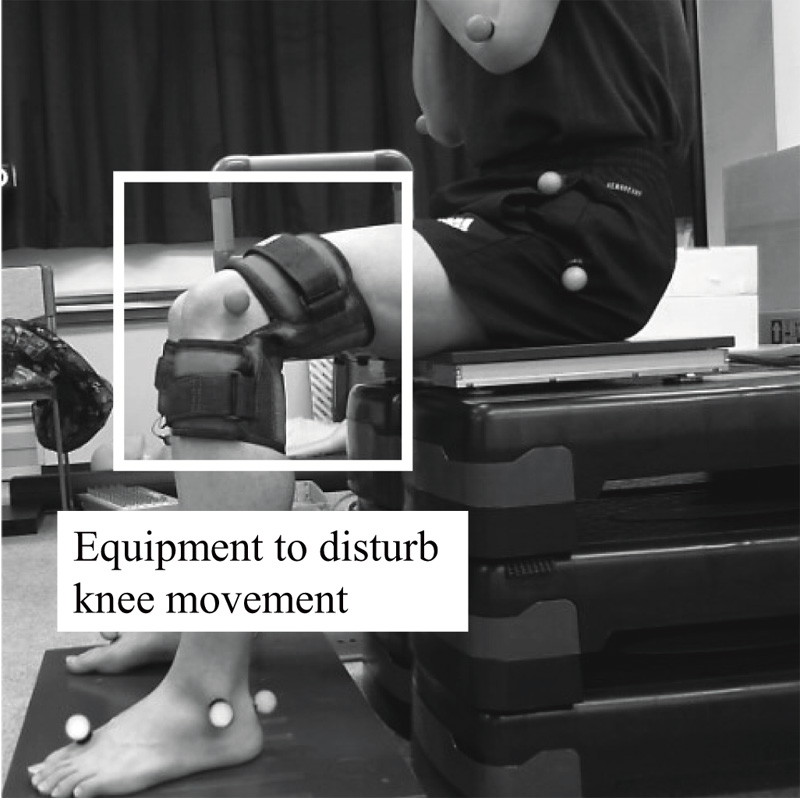
Muscle synergies change when knee movability is disturbed
- [1] M. Tagami, M. Hasegawa, W. Tanahara, and Y. Tagawa, “Prototype of a Continuous Passive Motion Device for the Knee Joint with a Function of Active Exercise,” J. Robot. Mechatron., Vol.34, No.1, pp. 28-39, 2022.
- [2] A. Higuchi, J. Shiraishi, Y. Kurita, and T. Shibata, “Effects of gait inducing assist for patients with parkinson’s disease on double support phase during gait,” J. Robot. Mechatron., Vol.32, No.4, pp. 798-811, 2020.
- [3] K. Nishizawa, T. Tsumugiwa, and R. Yokogawa, “Gait Rehabilitation and Locomotion Support System Using a Distributed Controlled Robot System,” J. Robot. Mechatron., Vol.34, No.1, pp. 72-85, 2022.
- [4] N. A. Bernshtein, “The Co-ordination and Regulation of Movements,” Pergamon Press, 1967.
- [5] Q. An, Y. Ishikawa, S. Aoi, T. Funato, H. Oka, H. Yamakawa, A. Yamashita, and H. Asama, “Analysis of muscle synergy contribution on human standing-up motion using a neuro-musculoskeletal model,” Proc. of IEEE Int. Conf. on Robotics and Automation, pp. 5885-5890, 2015.
- [6] N. Yang, Q. An, H. Yamakawa, Y. Tamura, A. Yamashita, and H. Asama, “Muscle synergy structure using different strategies in human standing-up motion,” Advanced Robotics, Vol.31, No.1-2, pp. 40-54, 2017.
- [7] K. Yoshida, Q. An, A. Yozu, R. Chiba, K. Takakusaki, H. Yamakawa, Y. Tamura, A. Yamashita, and H. Asama, “Visual and vestibular inputs affect muscle synergies responsible for body extension and stabilization in sit-to-stand motion,” Frontiers in Neuroscience, Vol.13, pp. 1-12, 2019.
- [8] T. Togoe, P. H. Tung, K. Honda, Y. Nakashima, and M. Yamamoto, “Evaluation of muscle activity and human standing stability index using the swash plate in a disturbance application,” J. Robot. Mechatron., Vol.33, No.4, pp. 868-876, 2021.
- [9] K. Yoshida, T. Tobimatsu, T. Nasu, R. Takada, A. Nishino, S. Saisho, and J. Okata, “Appropriate house modification manual for elderly living home with frail,” APRU Aging in the Asia-Pacific Workshop 2017 for Junior Gerontologists Poster Presentations Abstracts, p. 48, Tokyo, 2017.
- [10] T. Kizuka, T. Masuda, T. Kiryu, and T. Sadoyama, “Practical usage of surface electromyogram,” Tokyo Denki University Press, Tokyo, 2006 (in Japanese).
- [11] D. D. Lee and H. S. Seung, “Learning the parts of objects by non-negative matrix factorization,” Nature, Vol.401, No.6755, pp. 788-791, 1999.
- [12] T. Takei, J. Confais, S. Tomatsu, T. Oya, and K. Seki, “Neural Basis for Hand Muscle Synergies in the Primate Spinal Cord,” Proc. of the National Academy of Sciences, Vol.114, No.32, pp. 8643-8648, 2017.
- [13] Y. P. Ivanenko, G. Cappellini, N. Dominici, R. E. Poppele, and F. Lacquaniti, “Coordination of Locomotion with Voluntary Movements in Humans,” J. of Neuroscience, Vol.25, No.31, pp. 7238-7253, 2005.
- [14] J. W. Tukey, “Comparing Individual Means in the Analysis of Variance,” Biometrics, Vol.5, No.2, pp. 99-114, 1949.
- [15] N. Yang, Q. An, H. Kogami, H. Yamakawa, Y. Tamura, K. Takahashi, M. Kinomoto, H. Yamasaki, M. Itkonen, F. Shibata-Alnajjar, S. Shimoda, N. Hattori, T. Fujii, H. Otomune, I. Miyai, A. Yamashita, and H. Asama, “Temporal Features of Muscle Synergies in Sit-to-Stand Motion Reflect the Motor Impairment of Post-Stroke Patients,” IEEE Trans. on Neural Systems and Rehabilitation Engineering, Vol.27, No.10, pp. 2118-2127, 2019.
- [16] N. Yang, Q. An, H. Kogami, K. Yoshida, H. Yamakawa, Y. Tamura, S. Shimoda, H. Yamasaki, M. Sonoo, M. Itkonen, F. Alnajjar, N. Hattori, M. Kinomoto, K. Takahashi, T. Fujii, H. Otomune, I. Miyai, A. Yamashita, and H. Asama, “Temporal muscle synergy features estimate effects of short-term rehabilitation in sit-to-stand of post-stroke patients,” IEEE Robotics and Automation Letters, Vol.5, No.2, pp. 1796-1802, 2020.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.