Paper:
Extraction and Evaluation of Greeting Speech-Timing and Characteristic Upper Body Motion for Robots to Gain Attention of Older Adults
Mizuki Enoki, Tomoki Inaishi, and Hiroshi Noguchi
Department of Electrical and Electronic Systems Engineering, Graduate School of Engineering, Osaka Metropolitan University
3-3-138 Sugimito, Sumiyoshi-ku, Osaka City, Osaka 558-8585, Japan

Greeting is important for socially assistive robot to smoothly initiate conversations with older adults. Because of their decreased cognitive function, older adults may occasionally be unaware of the presence of a robot. The purpose of this study was to investigate and evaluate the characteristic motion and utterance time for greeting older adults in comparison with those for greeting non-older adults. The motion and utterance for greeting a seated target imitating an older adult and greeting a non-older adult were measured. The utterance times of the greeting and motion parameters such as the maximum joint angles were calculated from the measured data. The parameters were compared using statistical methods. According to the results, the hip bending angle in older adults was 36.6° greater than in the non-older adults. The utterance lag for greeting the older adults was 0.7 s longer than that for greeting the non-older adults at this time. The impressions of the robot that greeted the participants based on the extracted motion parameters were compared to verify these parameter differences. Although the greeting styles did not differ significantly, it was verified that the robot’s greeting was more impressive than that of a computer-graphics robot.
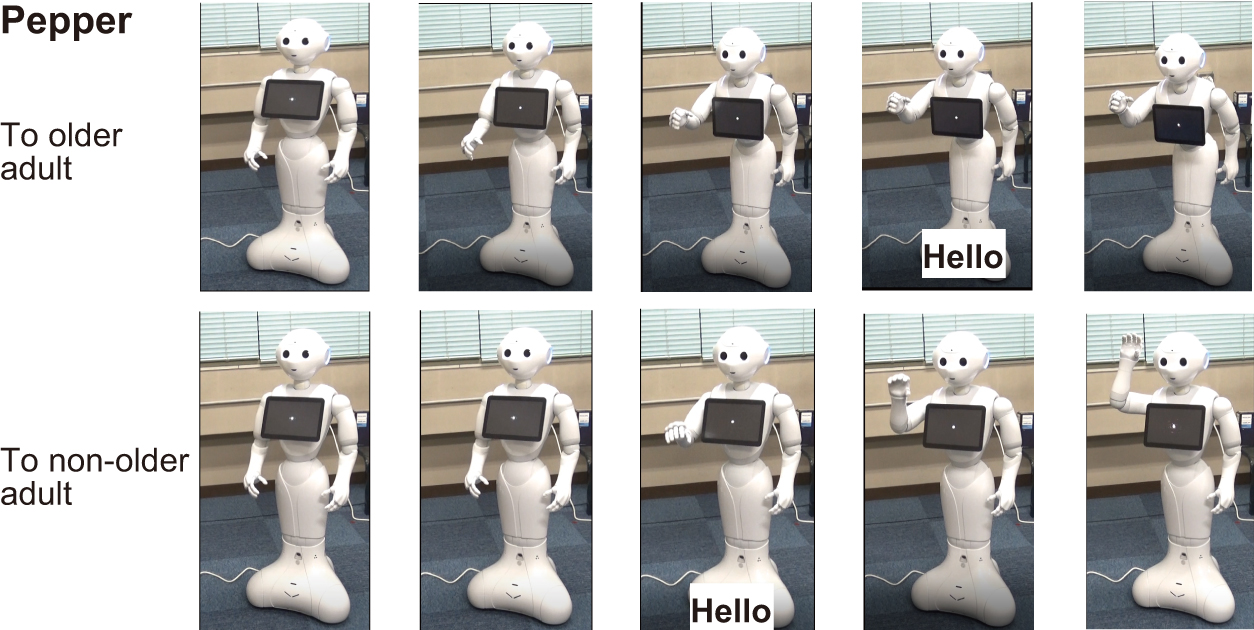
Robot greeting motion to gain attention
- [1] K. Wada, T. Shibata T. Saito, and K. Tanie, “Psychological and social effects of robot-assisted activity in the elderly robot-assisted at health service facilities,” J. Adv. Comput. Intell. Intell. Inform., Vol.7, No.2, pp. 130-138, 2003.
- [2] A. Liang, I. Piroth, H. Robinson, B. MacDonald, M. Fisher, U. M. Nater, N. Skoluda, and E. Broadbent, “A pilot randomized trial of a companion robot for people with dementia living in the community,” J. of the American Medical Directors Association, Vol.18, pp. 871-878, 2017.
- [3] R. Bemelmans, G. J. Gelderblom, P. Jonker, and L. de Witte, “How to use robot interventions in intramural psychogeriatric care; a feasibility study,” Applied Nursing Research: ANR, Vol.30, pp. 154-157, 2016.
- [4] H. Robinson, B. A. MacDonald, N. Kerse, and E. Broadbent, “Suitability of healthcare robots for a dementia unit and suggested improvements,” J. of the American Medical Directors Association, Vol.14, pp. 34-40, 2013.
- [5] N. Jøranson, I. Pedersen, A. M. M. Rokstad, and C. Ihlebæk, “Effects on symptoms of agitation and depression in persons with dementia participating in robot-assisted activity: A cluster-randomized controlled trial,” J. of the American Medical Directors Association, Vol.16, pp. 867-873, 2015.
- [6] E. Mordoch, A. Osterreicher, L. Guse, K. Roger, and G. Thompson, “Use of social commitment robots in the care of elderly people with dementia: a literature review,” Maturitas, Vol.74, No.1, pp. 14-20, 2013.
- [7] M. V. Soler, L. Agüera-Ortiz, J. O. Rodríguez, C. M. Rebolledo, A. P. Muñoz, I. R. Pérez, E. O. Ruiz, A. B. Sánchez, V. H. Cano, L. C. Chillón, S. F. Ruiz, J. L. Alvarez, B. L. Salas, J. M. C. Plaza, F. M. Rico, G. A. Dago, and P. M. Martín, “Social robots in advanced dementia,” Frontiers in aging neuroscience, Vol.7, Article No.133, 2015.
- [8] M. Tanaka, A. Ishii, E. Yamano, H. Ogikubo, M. Okazaki, K. Kamimura, Y. Konishi, S. Emoto, and Y. Watanabe, “Effect of a human-type communication robot on cognitive function in elderly women living alone,” Medical Science Monitor, Vol.18, No.9, pp. 550-557, 2012.
- [9] R. Yamazaki, H. Kase, S. Nishio, and H. Ishiguro, “Anxiety reduction through close communication with robotic media in dementia patients and healthy older adults,” J. Robot. Mechatron., Vol.32, No.1, pp. 32-42, 2020.
- [10] K. Obayashi, N. Kodate, and S. Masuyama, “Measuring the impact of age, gender and dementia on communication-robot interventions in residential care homes,” Geriatrics Gerontology Int., Vol.20, pp. 373-378, 2020.
- [11] T. Ozeki, T. Mouri, H. Sugiura, Y. Yano, and K. Miyosawa, “Impression survey and grounded theory analysis of the development of medication support robots for patients with schizophrenia,” J. Robot. Mechatron., Vol.33, No.4, pp. 747-755, 2021.
- [12] Y. Koyano, H. Noguchi, and H. Sanada, “Can the use of a human-shaped communication robot enhance motivation for inpatient rehabilitation?,” J. of Nursing Science and Engineering, Vol.7, pp. 170-176, 2020.
- [13] H. Noguchi, Y. Koyano, H. Mori, C. Komiyama, H. Sanada, and T. Mori, “Exploration of communication robot use for older patients in an acute hospital based on case trials,” J. of Nursing Science and Engineering, Vol.6, No.2, pp. 70-82, 2019.
- [14] S. Li, B. Wrede, and G. Sagerer, “A dialog system for comparative user studies on robot verbal behavior,” The 15th IEEE Int. Symposium on Robot and Human Interactive Communication (RO-MAN), pp. 129-134, 2006.
- [15] R. Gockley, A. Bruce, J. Forlizzi, M. Michalowski, A. Mundell, S. Rosenthal, B. Sellner, R. Simmons, K. Snipes, A. C. Schultz, and J. Wang, “Designing robots for long-term social interaction,” 2005 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 1338-1343, 2005.
- [16] T. Hirano, M. Shiomi, T. Iio, M. Kimoto, I. Tanev, K. Shimohara, and N. Hagita, “How do communication cues change impressions of human-robot touch interaction?,” Int. J. of Social Robotics, Vol.10, pp. 21-31, 2018.
- [17] M. Shiomi, T. Hirano, M. Kimoto, T. Iio, and K. Shimohara, “Gaze-height and speech-timing effects on feeling robot-initiated touches,” J. Robot. Mechatron., Vol.32, No.1, pp. 68-75, 2020.
- [18] H. Kiilavuori, V. Sariola, M. J. Peltola, and J. K. Hietanen, “Making eye contact with a robot: Psychophysiological responses to eye contact with a human and with a humanoid robot,” Biological Psychology, Vol.158, pp. 1-13, 2021.
- [19] T. L. Chen, C.-H. A. King, A. L. Thomaz, and C. C. Kemp, “An investigation of responses to robot-initiated touch in a nursing context,” Int. J. of Social Robotics, Vol.6, pp. 141-161, 2014.
- [20] W.-F. Hsieh, E. Sato-Shimokawara, and T. Yamaguchi, “Investigation of robot expression style in human-robot interaction,” J. Robot. Mechatron., Vol.32, No.1, pp. 224-235, 2020.
- [21] M. L. Walters, D. S. Syrdal, K. L. Koay, and K. Dautenhahn, “Human approach distances to a mechanical-looking robot with different robot voice styles,” The 17th IEEE Int. Symposium on Robot and Human Interactive Communication (RO-MAN), pp. 707-712, 2008.
- [22] K. Dautenhahn, M. L. Walters, S. Woods, and K. L. Koay, “How may i serve you? a robot companion approaching a seated person in a helping context,” the 1st ACM SIGCHI/SIGART Conf. on Human-Robot Interaction, 2006.
- [23] M. Jindai, S. Ota, T. Yasuda, and T. Sasaki, “Robot motion characteristics for embodied interaction with humans using upper arm,” J. of Advanced Mechanical Design, Systems, and Manufacturing, Vol.14, No.6, Article No.JAMDSM0089, 2020.
- [24] T. Obo and K. Takizawa, “Analysis of timing and effect of visual cue on turn-taking in human-robot interaction,” J. Robot. Mechatron., Vol.34, No.1, pp. 55-63, 2022.
- [25] M. Yamamoto and T. Watanabe, “Effects of time lag of utterances to communicative actions on embodied interaction with robot and cg character,” Int. J. of Human-Computer Interaction, pp. 87-107, 2008.
- [26] H. Kamide, M. Yasumoto, Y. Mae, T. Takubo, K. Ohara, and T. Arai, “Comparative evaluation of virtual and real humanoid with robot-oriented psychology scale,” IEEE Int. Conf. on Robotics and Automation, pp. 599-604, 2011.
- [27] H. Sumioka, M. Shiomi, M. Honda, and A. Nakazawa, “Technical challenges for smooth interaction with seniors with dementia: Lessons from humanitude?,” Frontiers in Robotics and AI, 2021.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.