

Abstract
Our perception of compliance is informed by multi-dimensional tactile cues. Compared with stationary cues at terminal contact, time-dependent cues may afford optimal efficiency, speed, and fidelity. In this work, we investigate strategies by which temporal cues may encode compliances by modulating our exploration time. Two potential perceptual strategies are considered, inspired by memory representations within and between explorations. For either strategy, we introduce a unique computational approach. First, a curve similarity analysis, of accumulating touch force between sequentially explored compliances, generates a minimum time for discrimination. Second, a Kalman filtering approach derives a recognition time from progressive integration of stiffness estimates over time within a single exploration. Human-subjects experiments are conducted for both single finger touch and pinch grasp. The results indicate that for either strategy, by employing a more natural pinch grasp, time-dependent cues afford greater efficiency by reducing the exploration time, especially for harder objects. Moreover, compared to single finger touch, pinch grasp improves discrimination rates in judging plum ripeness. The time-dependent strategies as defined here appear promising, and may tie with the time-scales over which we make perceptual judgments.
I. Introduction
We interact with soft, compliant, and deformable materials on a daily basis in dexterous manipulation, conveying emotions, and environmental exploration. For example, we need to judge the edibility of food for survival, tap the shoulder of another to get their attention, or rub a textile to feel its furriness [1]–[3]. Such naturalistic interactions require us to optimally acquire, recognize, and discriminate the mechanical properties of the substance or structure of objects. We do so by perceptual procedures which integrate and update our prior expectations, exploratory strategies, elicited sensorimotor inputs, and internal representations [4]–[6].
With respect to the dimension of compliance, cutaneous and proprioceptive cues are recruited and integrated into multimodal inputs, and conveyed and converged at the perceptual space where compliances are recognized and discriminated [1], [7], [8]. Many efforts have focused on cues of contact area, skin deformation, and kinesthetic inputs of force and joint angles [1], [5], [7]. However, works with tactile displays suggest that replicating these stationary cues alone does not afford realistic perceptual acuity as naturalistic stimuli [1], [7], [9]–[11]. The task of identifying the most energy efficient, fast, salient, and naturalistic perceptual cues remains relevant and timely.
Indeed, physical cues of a time-dependent nature, e.g., the change rate of skin deformation, penetration of surface, and dynamics of finger joints are suggested to improve efficiency and fidelity in conveying compliance [5], [6], [10]. In fact, for the case of differentiating stimulus curvature and angle, the relative timing of just the first spikes elicited in tactile afferents reliably conveys such spatial information [12]. At the behavioral level, the availability of force-rate cues can make the compliant objects more readily discriminable, by reducing the amount of skin deformation [10]. Moreover, when terminal contact area cues are non-distinct, displacements are volitionally matched so to generate discriminable force-rate cues [5]. Furthermore, the duration and sequence of exploration procedures also affect compliance discrimination. Prior study with rubber stimuli shows that longer duration of exploration with the slower imposed force results in a compliance judged softer [13]. When exploring objects sequentially, relevant sensory inputs are progressively gathered, retained, and integrated over time. Therefore, subsequent percepts might encode the fading representation of previous explorations [14], [15], and not all information contributes equally to the final percept [16], [17].
In summary, we do not yet fully understand how time-dependent cues could optimally encode naturalistic compliances over the course of exploration. As a step in this direction, this work uses computational approaches to study how temporal cues estimate the minimum exploration time required for discriminating the compliance of soft plum fruit in two different exploratory procedures.
II. Methods
The work herein investigates the minimum exploration time required for the integration of elicited temporal cues in discriminating naturalistic, compliant objects, i.e., plums varying in ripeness. Two computational approaches were developed to estimate the minimum discrimination time required under two perceptual modes. In the first approach, the discrimination of sequentially explored compliances was done whereby traces of touch force were compared in a similarity analysis, to estimate the time point where they diverged between soft and hard plums. In the second approach, the independent recognition of compliance within one single exploration was done whereby virtual stiffness cues were progressively optimized by Kalman filtering, to derive the time point where a reliable stiffness percept was obtained for each plum. Experimental platforms were built such that plum stimuli could be explored by both single finger touch and pinch grasp procedure. In a human-subjects study with ten participants, four plum pairs were employed, each with one riper than the other. Psychophysical experiments were conducted where participants operated under their own active, volitional control of exploratory movements.
A. Experimental Apparatus
For the exploratory procedure of single finger touch, an experimental platform was built as shown in Fig. 1A. Based on a fine-adjust rotary table, platforms were installed to present the plum stimuli. Each platform was built with a plastic circular pipe upon where the spherical stimulus was held and could be rotated. The imposed force was measured at 80 Hz by an instrumented load cell, which was fixed beneath each platform (5 kg, TAL220B, HTC Sensor). The position of the participant’s fingertip was measured at 1.5 kHz by a laser triangulation displacement sensor which was mounted above the table (10 μm, optoNCDT ILD 1402-100, Micro-Epsilon). Participants were instructed to press the index finger down into the stimulus while the forearm and wrist rested upon a parallel beam.
Figure 1.
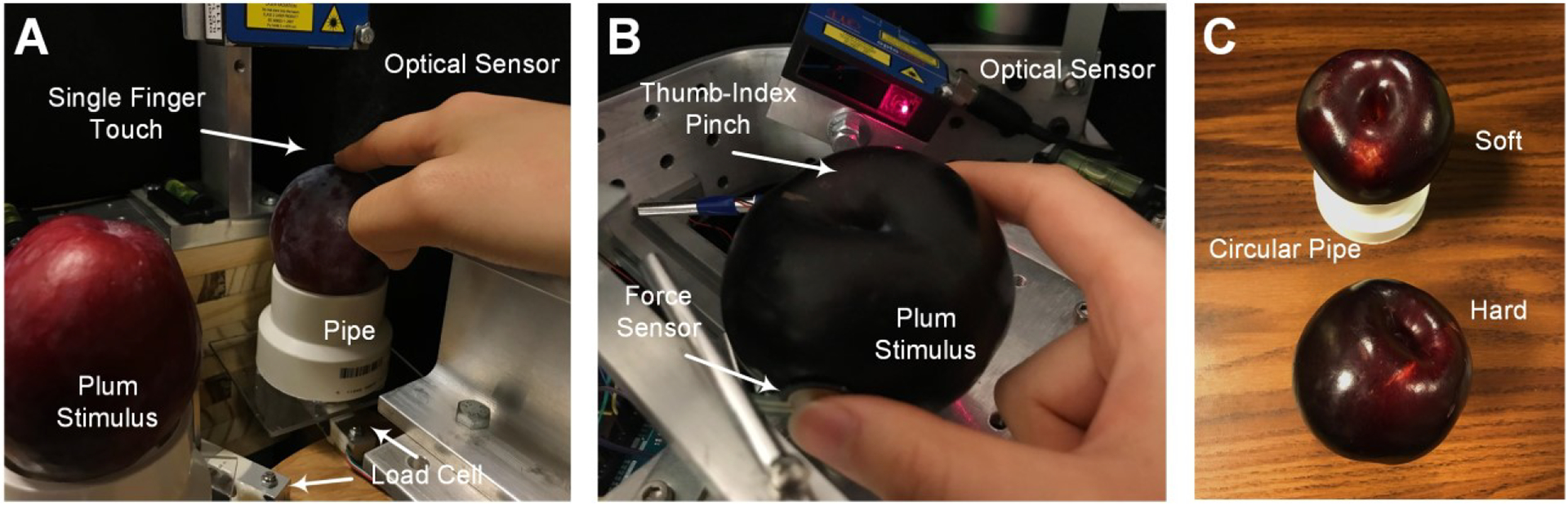
Experimental setup of test rigs and fruit specimens. A) In the setup for single finger touch, designated plum stimuli were presented on the platforms installed on a rotary table. Instrumented load cells were mounted beneath to measure imposed touch force. The vertical position of the fingertip is measured by a laser displacement sensor. B) In the setup for pinch grasp, the plum is grasped by the thumb and index finger and held by four carriage bolts horizontally. Touch force of each finger is measured by a force sensitive resistor attached on the plum surface. The displacement of the index fingertip is measured by the laser sensor. C) One pair of soft and hard plums employed in the experiments was presented on circular pipes.
For the exploratory procedure of thumb-index pinch grasp, an experimental platform was built as shown in Fig. 1B. The plum stimulus was held by four vertical bolts and could be pinched by the thumb and index finger horizontally. Force sensitive resistors (0.1–10 kg, FAR 400/402, Interlink Electronics) were attached on symmetrical sides of the plum and contacted by the two fingers in measuring grasp force at 1 kHz. The position of the participant’s index finger was measured by the aforementioned laser sensor which was fixed horizontally.
B. Naturalistic Stimuli
The pluot was selected as the fruit specimen, which is a hybrid between different plum species. In total, eight plums were employed in the experiments and they were about 6.6 ± 0.6 cm in diameter and 163.3 ± 8.8 gram in weight. Based on the insertion sort algorithm, a brief psychophysical experiment was conducted to evaluate the compliances of the plum array. Starting from the left, the experimenter picked up the unsorted plum and compared its compliance to the adjacent plum on the left. Secondly, if the selected one was softer, then space was created for it by shifting the other plum one position to the right and inserting the selected one into the slot. Otherwise, no move was required. The above procedure was repeated until all the plums were addressed, resulting in a final sorted plum array from the softest to the hardest. The first four plums were labeled as the “soft” set, and the other four were labeled as the “hard” set. Finally, all plums were allocated into four pairs consisting of one soft and one hard plum. Each plum pair was used by one of the four participant groups respectively.
C. Measurement of Force and Displacement
For the single finger touch, force readings from load cells were smoothed to remove any electrical artifacts by a rational transfer function with the denominator of 1 and a window size of 10. Force-rate was approximated by calculating the difference between adjacent force readings along the timeline. For the pinch grasp procedure, readings from the force sensitive sensors were processed by the aforementioned moving filter and the force-rate was calculated using the same approach. As reported previously, for fingertip displacements, the position of the fingernail was first measured by the laser sensor and then smoothed by the aforementioned moving filter with a window size of 30 [5]. The final displacement was then calculated as the absolute difference between the initiation and conclusion of the movement.
D. Time Estimates of Compliance Discrimination
In the first perceptual strategy, to have a robust estimation of the minimum time for discriminating the compliance between sequentially explored plums, the accumulations of force were extracted and processed for similarity analysis. As shown in Fig. 2A, selected trial data were averaged and cropped for the soft and hard plums, respectively, resulting in two force curves over the same duration. Corresponding force-rate curves were also calculated by the aforementioned method. The discriminability between the soft and hard curves is quantified by the discrete variation of the Fréchet distance which is a measure of similarity between polygonal curves [18]. In order to improve computational efficiency, each force curve was downsampled by a factor of 50, resulting in two polygonal curves H : [0, n] and S : [0, n] while each was made of n connected segments, as illustrated in Fig. 2C. The sequences of the endpoints of the line segments were denoted by σ(H) = (u1, …, un) and σ(S) = (v1, …, vn) respectively. A coupling L between H and S was defined as a non-decreasing sequence of distinct pairs from σ(H) × σ(S) as follows:
| (1) |
where a1 = b1 = 1, am = bm = n, and for each i ∈ {1, 2, …, m −2}, let ai+1 = (1 – λ)ai + λ(ai + 1), bi+1 = (1 – λ)bi + λ(bi + 1) with all λ ∈ {0, 1}. The length ‖L‖ was then calculated as the maximum Euclidian distance among those sequence pairs:
| (2) |
Finally, the discreet Fréchet distance between curve H and S was calculated as
| (3) |
which grows positively from zero as the two curves become more dissimilar, as illustrated in Fig. 2E. Based on the just noticeable differences (JNDs) for human perception of touch force reported by prior studies [19], [20], a threshold of 10% was set to find the time point when one could differentiate force cues from the representations of the soft and hard plums, which was defined herein as the estimate of required minimum time for compliance discrimination. As shown in Fig. 2D and 2F, time estimate with the force-rate cue was also calculated by the aforementioned method accordingly. Therefore, two different estimates of the required minimum time over the course of compliance discrimination were derived by differencing force and force-rate cues.
Figure 2.
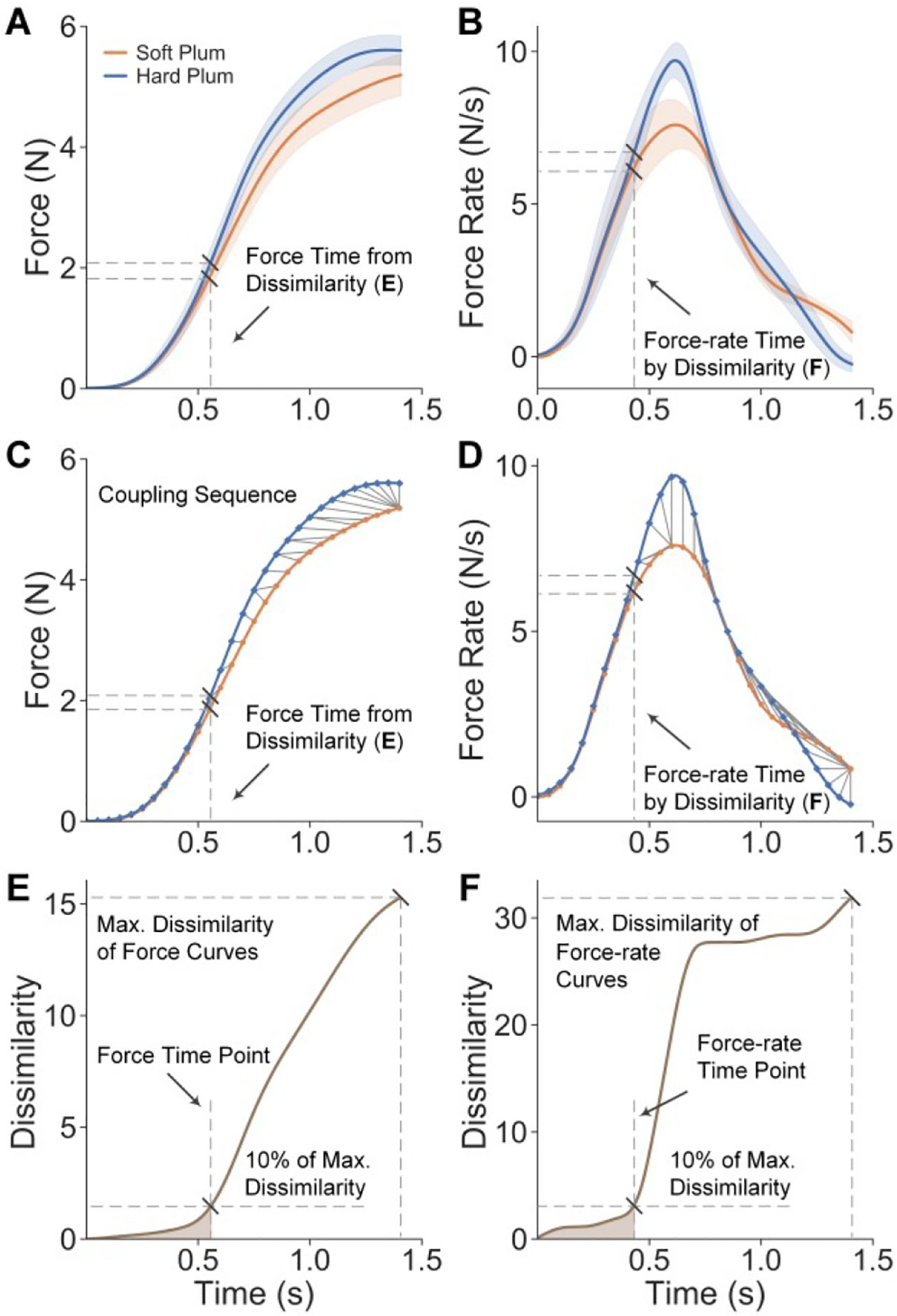
Estimates of required minimum time for discriminating the compliance between sequentially explored plums by differencing force-related cues with exemplar trial data. A) Touch force curves over a partial course of exploration for the soft-hard plums. Translucent bands denote the standard deviation of force values. B) Corresponding force-rate curves for soft and hand plums. Translucent bands denote the standard deviation of force-rate values. The coupling sequences are illustrated along with each discrete distance between endpoints of segments for the force curves (C) and corresponding force-rate curves (D). The similarity between the soft-hard curve is quantified by the discrete Fréchet distance for the force (E) and force-rate cue (F). The detection threshold is set according to the reported JNDs of force perception and the final estimates of required minimum time for discriminating the soft-hard plums are denoted accordingly.
E. Time Estimates of Compliance Recognition
In the second perceptual strategy, to have a reliable estimation of the minimum time for independent recognition of the compliance retained and gathered within single exploration, force-displacement curves were extracted and processed by the proposed model based on Kalman filtering procedure. As illustrated in Fig. 3, selected trial data were averaged and cropped for the soft and hard plums respectively, resulting in two curves with the same length of n. Considering a noise-free linear spring model in tapping, the instantaneous virtual stiffness (excluding for the first time point) was derived as
| (4) |
according to Hooke’s law for each j ∈ {2, 3, …, n}. Adapted from the recursive Bayesian updating model proposed in [6], estimate of the virtual stiffness was initiated by k2 and updated with stepwise inputs from virtual stiffness cues. Each step i ∈ {3, 4, …, n} updated prior estimate by combining weighted input of current virtual stiffness ki:
| (5) |
Kg ∈ (0, 1) denoted the Kalman gain which was derived by the covariance of prior and current estimate:
| (6) |
Finally, the stiffness estimate evolved recursively over time with an updated covariance of . As shown in Fig. 3, the Kalman gain approaches to zero when estimate is updated to be stable over the course of exploration. Based on the aforementioned justification, a detection threshold of 10% was set to find the first time point when one could have a reliable percept of stiffness, which was defined herein as the estimate of required minimum time for the recognition of the plum compliance by recursively integrating perceptual gains from virtual stiffness cues within a single exploration.
Figure 3.
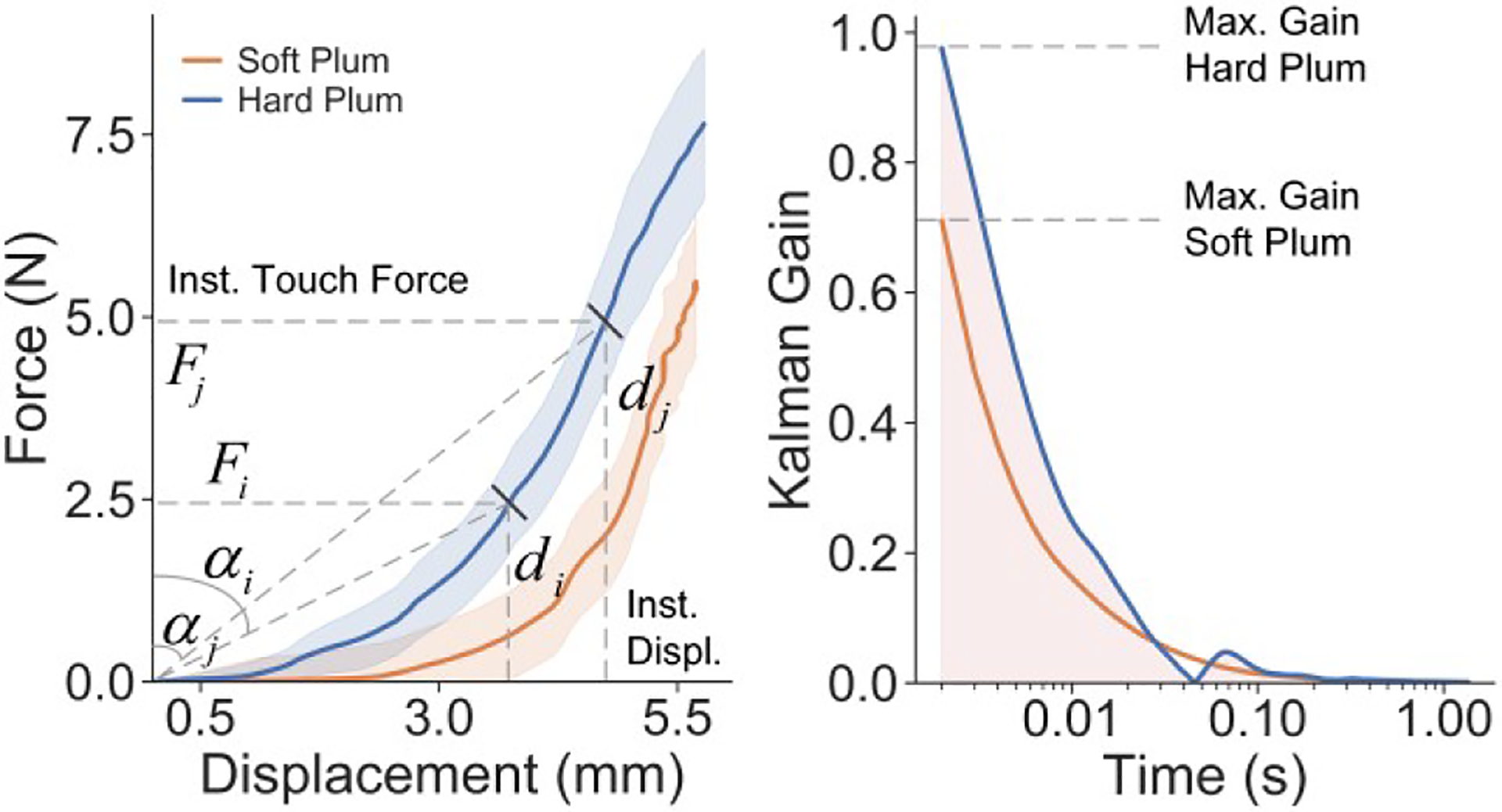
Estimates of required minimum time for the recognition of compliance based on the updating model of virtual stiffness cue with exemplar trial data. Left: Relationships of touch force and fingertip displacement over a partial course of exploration. Instantaneous virtual stiffness is computed as the tangent of angle α. Translucent bands denote the standard deviation. Right: The Kalman gain quantifies the robustness of compliance estimates over the course of model updating. The x-axis is set to be logarithmical for more details. Detection thresholds are set as 10% of the maximum gain to find the required minimum time for reliable recognition of each plum compliance over the duration of exploration.
F. Participants
This study was approved by the Institutional Review Board at the University of Virginia. Ten subjects consented to participate in the experiments (7 females, 3 males, mean age = 25.2, SD = 2.1). No history of upper extremity defect that would impact sensorimotor capability was reported. All participants showed right-hand dominance and were assigned to four plum pairs consisting of 2, 2, 2, and 4 participants, respectively. The first three groups completed Experiment 1 and the last group completed Experiment 2. All participants continued to completion and no data was discarded.
G. Experimental Procedures
Experiment 1 – Psychophysical Experiments with Single Finger Touch:
Based on the same-different procedure, psychophysical discrimination on plum compliance was conducted under the participants’ fully active, volitional control of their finger movements. Three combinations of the two plums from one pair (soft-hard, soft-soft, and hard-hard) were employed. For every single trial with one combination, the participant explored the compliances by palpating each stimulus once without any time constraint on the contact interaction. Participants were blindfolded to eliminate any visual cues on the plum ripeness and their finger movements. After the two explorations were completed for one trial, participants were instructed to report whether the compliances of the two plums were the same of different. Imposed force and fingertip displacement were recorded by the aforementioned approaches. Each participant completed three trials for each plum combination, for a total of 54 trials.
Experiment 2 – Psychophysical Experiments with Pinch Grasp Condition:
The same discrimination procedure and plum combinations were employed in this experiment with a pinch grasp. As illustrated in Fig. 1B, to explore the compliance, participants pinched the plum horizontally with their thumb and index fingers without any constraint. The touch force of both fingers and the position of the index finger were recorded simultaneously. Each participant completed four trials for each plum combination, for a total of 48 trials.
H. Data Analysis
With the inherent difficulties in working with delicate soft fruits that change over time [11], the number of trials for each experimental conditions was limited to be unbalanced. To keep the number of results consistent among experimental conditions, recordings were rearranged as follows.
For the single finger touch (Experiment 1), recordings of force and displacement from each participant were randomly allocated into two groups. The first group consisted of four recordings for the soft and hard plum respectively, and the second group consisted of the rest five recordings for each plum. Within each group, trial data for the soft and hard plums were aggregated and averaged respectively, resulting in one averaged force-displacement curve for the soft and another one for the hard plum.
For the pinch grasp procedure (Experiment 2), recordings of force-displacement from each participant were randomly allocated into three groups. Each group consisted of four recordings for the soft and hard plum respectively. Within each group, data for the soft and hard plums were aggregated and averaged respectively as aforementioned.
For time estimates with force-related cues, within each data group, averaged force curves for the soft and hard plum were compared to have one estimate based on the two methods respectively, resulting in a total of 12 estimates for each gesture-method combination (Fig. 4). For time estimates with virtual stiffness cues, averaged force-displacement curves for the soft and hard plum were processed to have one estimate respectively, resulting in a total of 12 estimates for each gesture-compliance combination (Fig. 5).
Figure 4.
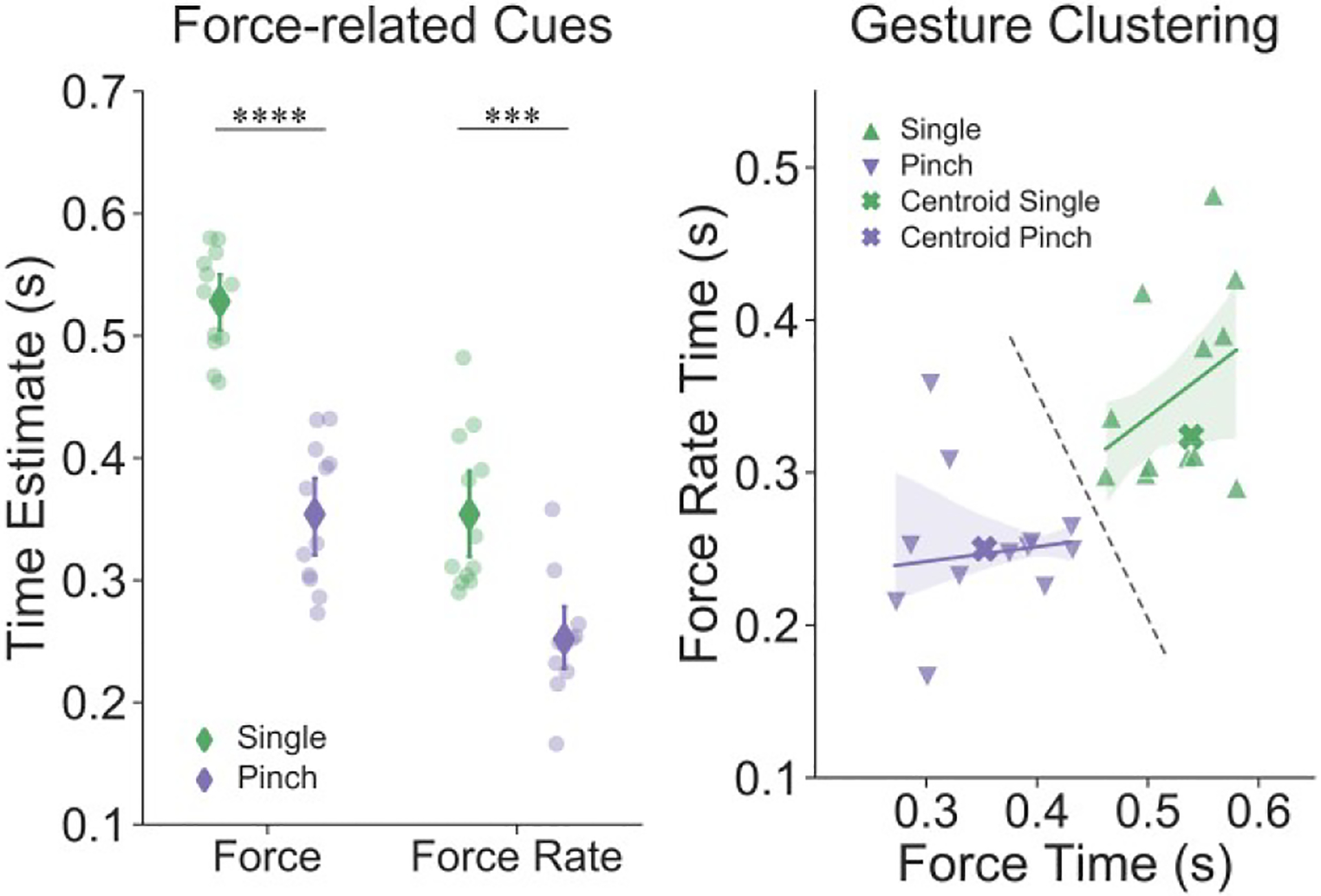
Time estimates of sequential compliance discrimination by differentiating force-related cues and multidimensional clustering analysis on gestures with all participants aggregated. Left: Time estimates by imposed force and force-rate cues. Points denote the results from grouped trials and diamonds denote the means. Error bars denote 95% confidence intervals. The ***significance and ****significance are denoted at p < 0.001 and p < 0.0001 by the Mann-Whitney U test. Right: All the time estimates based on imposed force and force-rate cue are partitioned into two exclusive clusters representing different gestures. Centroids and the dashed line indicate the arrangement of clusters. Linear regression is applied to illustrate the correlation on clustered data. Translucent bands denote 90% confidence intervals.
Figure 5.
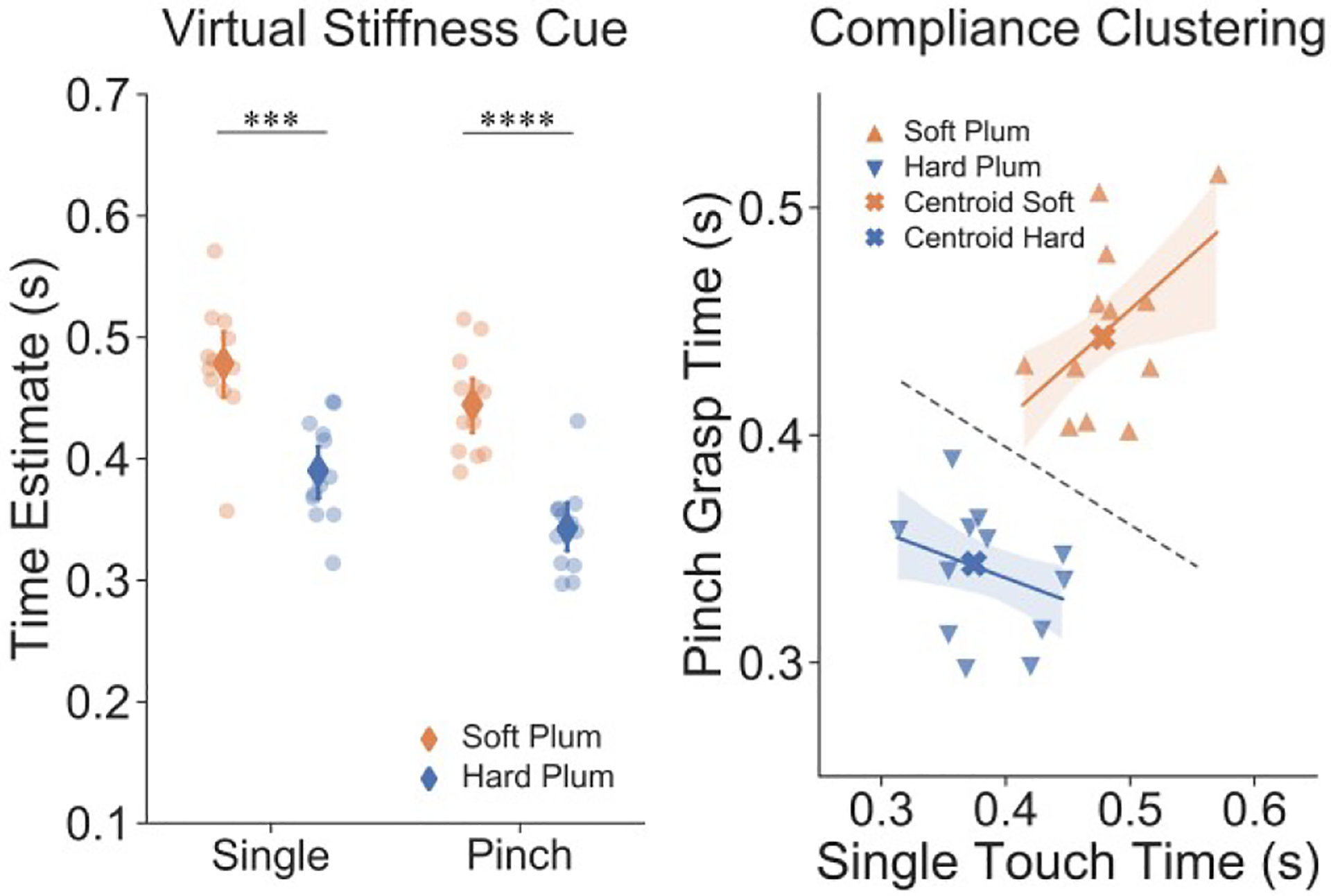
Time estimations of perceptual integration by virtual stiffness cue and multidimensional clustering analysis on compliance with all participants aggregated. Left: Time estimates by virtual stiffness cue for single touch and pinch grasp condition. Points denote the results from grouped trials and diamonds denote the means. Error bars denote 95% confidence intervals. The ***significance and ****significance are denoted at p < 0.001 and p < 0.0001 by the Mann-Whitney U test. Right: All the time estimates for single touch and pinch grasp are partitioned into two exclusive clusters representing different softness of the plum stimuli. Centroids and the dashed line indicate the arrangement of clusters. Linear regression is applied to illustrate the correlation on clustered data. Translucent bands denote 90% confidence intervals.
III. Results
A. Time Estimates of Compliance Discrimination
Estimates of the minimum time required for compliance discrimination by differentiating force-related cues were calculated for two exploratory procedures. As shown in Fig. 4, compared with the pinch grasp, participants tended to require significantly more time to discriminate with single finger touch when differentiating the force cues. The same trend was also obtained when employing the force-rate cue. It indicated that a more natural gesture could facilitate haptic exploration by reducing the required minimum time for differencing the force-related cues among sequentially explored stimuli.
Multidimensional clustering analysis was conducted to verify whether the gesture (exploratory procedure) indeed impacts the minimum time for discrimination via force-related cues. As shown in Fig. 4, based on time estimates from force and force-rate, data points were correctly clustered into two groups by the k-Means algorithm. When moving from single finger touch to pinch grasp procedure, the correlation between time estimates of force and force-rate has been changed as indicated by the linear regression results. This indicated that time estimates of discrimination could well encode the impact brought by different exploratory procedures, and pinch grasp indeed required lesser time for discrimination by force cues.
B. Time Estimates of Compliance Recognition
Estimates of the minimum time required for compliance recognition by the integration of perceived stiffness were calculated by virtual stiffness cues for the two exploratory procedures. As shown in Fig. 5, compared with exploring hard plums using the single finger touch, participants tended to require significantly more time to recognize the compliance of soft plums. The same result was obtained when exploring with the pinch grasp procedure. This indicated that higher compliance could facilitate active exploration by reducing the required time for compliance recognition.
Multidimensional clustering analysis was conducted to verify whether the plum compliance indeed impacts the required minimum time for compliance recognition by the updating procedure of virtual stiffness cues. As shown in Fig. 5, based on time estimates of single finger touch and pinch grasp, data points were clustered into two groups with a matching rate of 91.7%. When exploring with soft plums, the correlation between two estimates was changed compared to the result of hard plums. This indicated that time estimates of recognition could well encode plum compliances, and hard plums indeed required lesser time for compliance recognition.
C. Summary: Estimates of Compliance Discrimination
As illustrated in Fig. 6, estimates of the required minimum time for compliance discrimination were derived by touch force, force-rate, and virtual stiffness cues. In particular, the highest 12 estimates of recognition were considered as the minimum time for discrimination in single finger touch and pinch grasp respectively. The overall estimates were derived by the fusion of all these estimates via Kalman filtering. The results reinforced that pinch grasp procedure indeed facilitated the compliance discrimination by requiring lesser exploration time. This overall estimate also presented a more reliable measure by having the relatively lowest variations.
Figure 6.
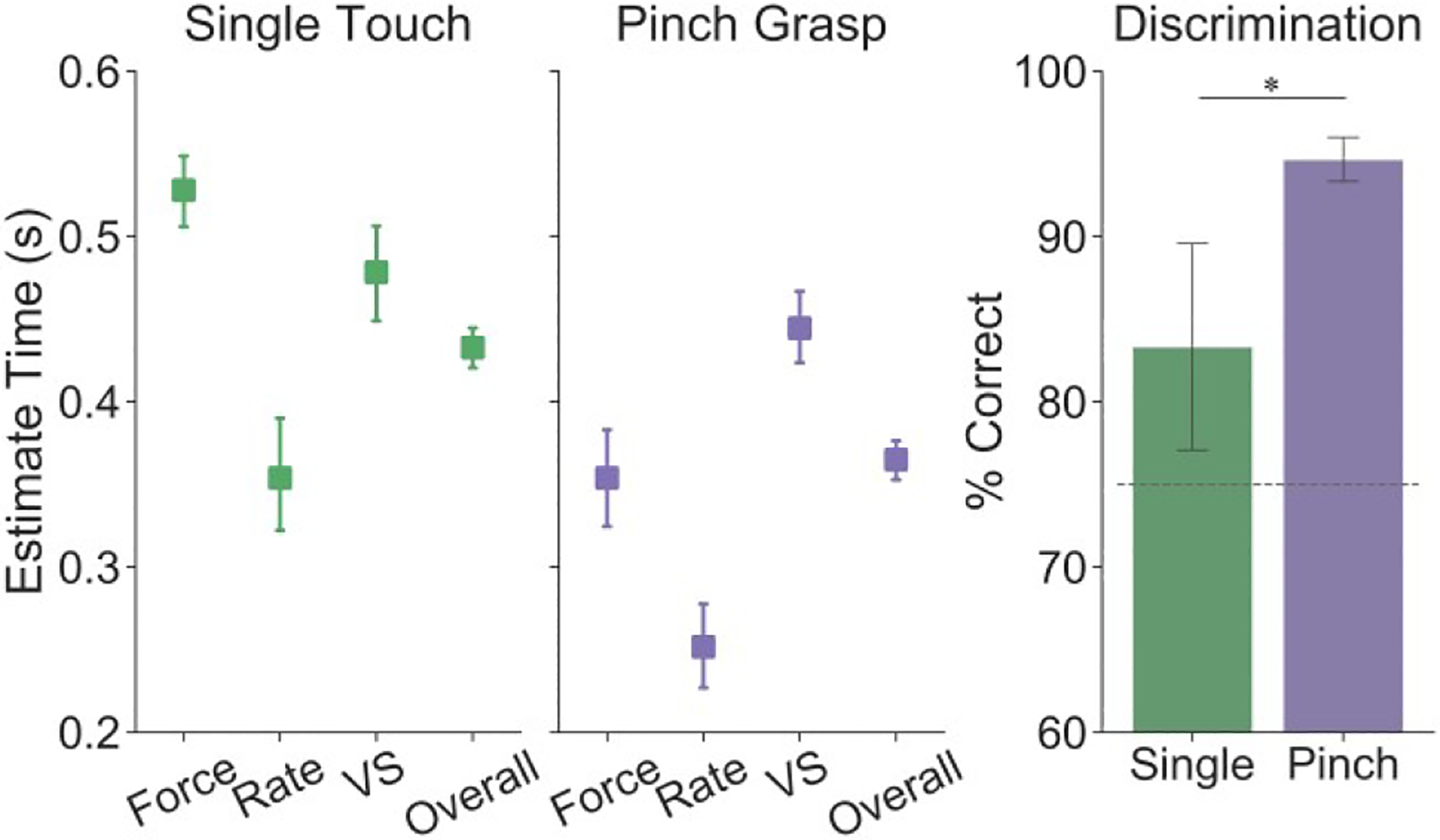
Overall time estimates and psychophysical discrimination for single finger touch and pinch grasp with all participants aggregated. Left: For the two contact gestures, overall estimates of the required minimum time for compliance discrimination based on data fusion of all individual estimates from the touch force, force-rate, and virtual stiffness cues. Note that the highest 12 estimates for each gesture in Fig. 5 were considered herein as the estimates by virtual stiffness cue accordingly. Right: Psychophysical discrimination in the soft-hard plums for the two contact gestures. The discrimination threshold is set as 75% for evaluation. The *significance and ****significance are denoted at p < 0.05 and p < 0.0001 by the Mann-Whitney U test. Error bars denote 95% confidence intervals.
D. Psychophysical Discrimination with Two Gestures
As shown in Fig. 6, when discriminating with the single finger procedure, participants could differentiate the soft-hard plums at a detection rate of 83.3%. Using the pinch grasp, discrimination performance improved significantly to 94.7%. This indicated that with reduced required exploration time, which was facilitated by the pinch procedure, participants indeed discriminated the compliances more optimally.
IV. Discussion
This work investigates the minimum exploration time required for the integration of elicited temporal cues in the perception of naturalistic compliances under two strategies. In the first strategy, discrimination time of sequentially explored compliances was derived by curve similarity analysis which compared accumulations of force cues between soft and hard plums. In the second strategy, recognition time of single explored compliance was derived by Kalman filtering which progressively optimized virtual stiffness cues to obtain reliable percept for each plum.
Overall, for either perceptual strategy, when employing the more natural model of pinch grasp as opposed to single finger touch, temporal cues afford greater efficiency by reducing the minimum time required for recognition and discrimination of explored compliances, as shown in Fig. 6. Furthermore, force-rate cues derived by the curve similarity method in discriminating sequentially explored compliances (first approach) are the fastest of either perceptually derived strategy (Fig. 4). That said, it is unclear if such perceptual strategy is viable. Therefore, the second approach, where virtual stiffness progressively estimates stiffness per plum, offers a rapid time estimate but with perhaps a closer tie to how an estimate is made per stimulus (Fig. 5).
As noted, force-related cues were employed to estimate the time point where percepts of distinct force cues could be differentiated between sequential explorations. Findings from prior studies indicate that, when exploring objects with deformable surfaces, e.g., silicone-elastomers or naturalistic objects, tactile cues of touch force and finger displacement indeed encode perception of compliance and might be utilized for psychophysical discrimination [1], [5], [7], [10], [20], [21]. In particular, there is a consensus that higher force and force-rate cues are applied when exploring harder stimuli as opposed to softer ones [5], [10], [20], [21].
The virtual stiffness cue is utilized herein to estimate the time point where optimal recognition is obtained during a single exploration. From prior work in virtual stiffness, the integration of force-related cues with displacement cues afford reliable estimates of stiffness perception [6], [20]. The maximum force and corresponding finger displacement at the end of compression were employed for the compliance judgment [20]. The change rate of the force-displacement curve was also considered as an efficient temporal cue which was quantified by regression slopes [22]. However, within one single exploration, the recognition of compliance could be modeled as an optimization procedure that recursively finds a stiffness estimate that best fits the perceived tactile cues [6]. This procedure keeps updating the estimate to the true value by the fusion of historical and current inputs. A decreasing variance indicates the growing robustness of the final stiffness estimate, as shown by Kalman gain in Fig. 3.
Our time estimates (~ 370 ms) are about ten times higher in absolute magnitude compared to time estimates of first neural spikes elicited in discriminating stimuli [12]. However, given neuromuscular time constraints (~160 ms) [12], multimodal integration delay (~100 ms) [8], and limitations of memory retrieval (up to 30 s) [14], our estimations at the behavioral level are reasonably sound. Moreover, our findings are derived from aggregated results between participants and sequential explorations. To gain further clarity on the utility of the two strategies, a further trial-by-trial analysis is required. Finally, temporal cues of skin deformation were not utilized due to the measurement limitations in the grasp of the force sensing resistors.
Acknowledgment
This work was supported in part by grants from the National Science Foundation (IIS-1908115) and National Institutes of Health (NINDS R01NS105241). The content is solely the responsibility of the authors and does not necessarily represent the official views of the NSF or NIH.
Contributor Information
Chang Xu, School of Engineering and Applied Science, University of Virginia, Charlottesville, VA 22904 USA..
Gregory J. Gerling, School of Engineering and Applied Science, University of Virginia, Charlottesville, VA 22904 USA..
References
- [1].Bergmann Tiest WM and Kappers AML, “Cues for haptic perception of compliance,” IEEE Trans. Haptics, vol. 2, no. 4, pp. 189–199, October. 2009. [DOI] [PubMed] [Google Scholar]
- [2].Massimiliano DL, “Perceived compliance in a pinch,” Vision Res, vol. 51, no. 8, pp. 961–967, April. 2011. [DOI] [PubMed] [Google Scholar]
- [3].Hauser SC, McIntyre S, Israr A, Olausson H, and Gerling GJ, “Uncovering Human-to-Human Physical Interactions that Underlie Emotional and Affective Touch Communication,” in Proc. IEEE World Haptics Conf. (WHC), 2019, pp. 407–412. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [4].Neisser U, Cognition and reality: Principles and implications of cognitive psychology. New York, NY, US: W H Freeman/Times Books/ Henry Holt & Co, 1976. [Google Scholar]
- [5].Xu C, Hauser SC, Wang Y, and Gerling GJ, “Roles of Force Cues and Proprioceptive Joint Angles in Active Exploration of Compliant Objects,” in Proc. IEEE World Haptics Conf. (WHC), 2019, pp. 353–358. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [6].Wu B and Klatzky RL, “A recursive bayesian updating model of haptic stiffness perception,” J. Exp. Psychol. Hum. Percept. Perform, vol. 44, no. 6, pp. 941–952, 2018. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [7].Srinivasan MA and LaMotte RH, “Tactual discrimination of softness.,” J. Neurophysiol, vol. 73, no. 1, pp. 88–101, 1995. [DOI] [PubMed] [Google Scholar]
- [8].Kim SS, Gomez-Ramirez M, Thakur PH, and Hsiao SS, “Multimodal Interactions between Proprioceptive and Cutaneous Signals in Primary Somatosensory Cortex,” Neuron, vol. 86, no. 2, pp. 555–566, April. 2015. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [9].Xu C, Wang Y, Hauser SC, and Gerling GJ, “In the Tactile Discrimination of Compliance, Perceptual Cues in Addition to Contact Area Are Required,” Proc. Hum. Factors Ergon. Soc. Annu. Meet, vol. 62, no. 1, pp. 1535–1539, September. 2018. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [10].Hauser SC and Gerling GJ, “Force-Rate Cues Reduce Object Deformation Necessary to Discriminate Compliances Harder than the Skin,” IEEE Trans. Haptics, vol. 11, no. 2, pp. 232–240, April. 2018. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [11].Xu C, He H, Hauser SC, and Gerling GJ, “Tactile Exploration Strategies with Natural Compliant Objects Elicit Virtual Stiffness Cues,” IEEE Trans. Haptics, pp. 1–1, 2019. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [12].Johansson RS and Birznieks I, “First spikes in ensembles of human tactile afferents code complex spatial fingertip events,” Nat. Neurosci, vol. 7, no. 2, pp. 170–177, February. 2004. [DOI] [PubMed] [Google Scholar]
- [13].Blair GWS and Coppen FMV, “The Subjective Conception of the Firmness of Soft Materials,” Am. J. Psychol, vol. 55, no. 2, p. 215, April. 1942. [Google Scholar]
- [14].Metzger A and Drewing K, “Effects of Stimulus Exploration Length and Time on the Integration of Information in Haptic Softness Discrimination,” IEEE Trans. Haptics, pp. 1–1, February. 2019. [DOI] [PubMed] [Google Scholar]
- [15].Metzger A and Drewing K, “Memory influences haptic perception of softness,” Sci. Rep, vol. 9, no. 1, December. 2019. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [16].Di Luca M, Knörlein B, Ernst MO, and Harders M, “Effects of visual-haptic asynchronies and loading-unloading movements on compliance perception,” Brain Res. Bull, vol. 85, no. 5, pp. 245–259, June. 2011. [DOI] [PubMed] [Google Scholar]
- [17].Metzger A, Lezkan A, and Drewing K, “Integration of serial sensory information in haptic perception of softness,” J. Exp. Psychol. Hum. Percept. Perform, vol. 44, no. 4, pp. 551–565, April. 2018. [DOI] [PubMed] [Google Scholar]
- [18].Eiter T and Mannila H, “Computing discrete Fréchet distance,” Vienna University of Technology, 1994. [Google Scholar]
- [19].Jones LA, “Matching forces: Constant errors and differential thresholds,” Perception, vol. 18, no. 5, pp. 681–687, 1989. [DOI] [PubMed] [Google Scholar]
- [20].Tan HZ, Durlach NI, Beauregard GL, and Srinivasan MA, “Manual discrimination of compliance using active pinch grasp: The roles of force and work cues,” Percept. Psychophys, vol. 57, no. 4, pp. 495–510, June. 1995. [DOI] [PubMed] [Google Scholar]
- [21].Kaim L and Drewing K, “Exploratory Strategies in Haptic Softness Discrimination Are Tuned to Achieve High Levels of Task Performance,” IEEE Trans. Haptics, vol. 4, no. 4, pp. 242–252, October. 2011. [DOI] [PubMed] [Google Scholar]
- [22].Nisky I, Mussa-Ivaldi FA, and Karniel A, “A regression and boundary-crossing-based model for the perception of delayed stiffness,” IEEE Trans. Haptics, vol. 1, no. 2, pp. 73–83, 2008. [DOI] [PubMed] [Google Scholar]